|
| enum | StatusCode : uint8_t {
STATUS_OK,
STATUS_WAITING,
STATUS_ERROR,
STATUS_COLLISION,
STATUS_TIMEOUT,
STATUS_NO_ROOM,
STATUS_INTERNAL_ERROR,
STATUS_INVALID,
STATUS_CRC_WRONG,
STATUS_MIFARE_NACK = 0xff
} |
| |
| enum | State {
STATE_NONE = 0,
STATE_SETUP,
STATE_INIT,
STATE_PICC_REQUEST_A,
STATE_READ_SERIAL,
STATE_SELECT_SERIAL,
STATE_SELECT_SERIAL_DONE,
STATE_READ_SERIAL_DONE,
STATE_DONE
} |
| |
| enum | PcdRegister : uint8_t {
COMMAND_REG = 0x01 << 1,
COM_I_EN_REG = 0x02 << 1,
DIV_I_EN_REG = 0x03 << 1,
COM_IRQ_REG = 0x04 << 1,
DIV_IRQ_REG = 0x05 << 1,
ERROR_REG = 0x06 << 1,
STATUS1_REG = 0x07 << 1,
STATUS2_REG = 0x08 << 1,
FIFO_DATA_REG = 0x09 << 1,
FIFO_LEVEL_REG = 0x0A << 1,
WATER_LEVEL_REG = 0x0B << 1,
CONTROL_REG = 0x0C << 1,
BIT_FRAMING_REG = 0x0D << 1,
COLL_REG = 0x0E << 1,
MODE_REG = 0x11 << 1,
TX_MODE_REG = 0x12 << 1,
RX_MODE_REG = 0x13 << 1,
TX_CONTROL_REG = 0x14 << 1,
TX_ASK_REG = 0x15 << 1,
TX_SEL_REG = 0x16 << 1,
RX_SEL_REG = 0x17 << 1,
RX_THRESHOLD_REG = 0x18 << 1,
DEMOD_REG = 0x19 << 1,
MF_TX_REG = 0x1C << 1,
MF_RX_REG = 0x1D << 1,
SERIAL_SPEED_REG = 0x1F << 1,
CRC_RESULT_REG_H = 0x21 << 1,
CRC_RESULT_REG_L = 0x22 << 1,
MOD_WIDTH_REG = 0x24 << 1,
RF_CFG_REG = 0x26 << 1,
GS_N_REG = 0x27 << 1,
CW_GS_P_REG = 0x28 << 1,
MOD_GS_P_REG = 0x29 << 1,
T_MODE_REG = 0x2A << 1,
T_PRESCALER_REG = 0x2B << 1,
T_RELOAD_REG_H = 0x2C << 1,
T_RELOAD_REG_L = 0x2D << 1,
T_COUNTER_VALUE_REG_H = 0x2E << 1,
T_COUNTER_VALUE_REG_L = 0x2F << 1,
TEST_SEL1_REG = 0x31 << 1,
TEST_SEL2_REG = 0x32 << 1,
TEST_PIN_EN_REG = 0x33 << 1,
TEST_PIN_VALUE_REG = 0x34 << 1,
TEST_BUS_REG = 0x35 << 1,
AUTO_TEST_REG = 0x36 << 1,
VERSION_REG = 0x37 << 1,
ANALOG_TEST_REG = 0x38 << 1,
TEST_DA_C1_REG = 0x39 << 1,
TEST_DA_C2_REG = 0x3A << 1,
TEST_ADC_REG = 0x3B << 1
} |
| |
| enum | PcdCommand : uint8_t {
PCD_IDLE = 0x00,
PCD_MEM = 0x01,
PCD_GENERATE_RANDOM_ID = 0x02,
PCD_CALC_CRC = 0x03,
PCD_TRANSMIT = 0x04,
PCD_NO_CMD_CHANGE = 0x07,
PCD_RECEIVE = 0x08,
PCD_TRANSCEIVE,
PCD_MF_AUTHENT = 0x0E,
PCD_SOFT_RESET = 0x0F
} |
| |
| enum | PiccCommand : uint8_t {
PICC_CMD_REQA = 0x26,
PICC_CMD_WUPA = 0x52,
PICC_CMD_CT = 0x88,
PICC_CMD_SEL_CL1 = 0x93,
PICC_CMD_SEL_CL2 = 0x95,
PICC_CMD_SEL_CL3 = 0x97,
PICC_CMD_HLTA = 0x50,
PICC_CMD_RATS = 0xE0,
PICC_CMD_MF_AUTH_KEY_A = 0x60,
PICC_CMD_MF_AUTH_KEY_B = 0x61,
PICC_CMD_MF_READ,
PICC_CMD_MF_WRITE = 0xA0,
PICC_CMD_MF_DECREMENT,
PICC_CMD_MF_INCREMENT,
PICC_CMD_MF_RESTORE = 0xC2,
PICC_CMD_MF_TRANSFER = 0xB0,
PICC_CMD_UL_WRITE = 0xA2
} |
| |
| enum | RC522Error { NONE = 0,
RESET_FAILED
} |
| |
|
| void | pcd_reset_ () |
| | Performs a soft reset on the MFRC522 chip and waits for it to be ready again. More...
|
| |
| void | initialize_ () |
| |
| void | pcd_antenna_on_ () |
| | Turns the antenna on by enabling pins TX1 and TX2. More...
|
| |
| void | pcd_antenna_off_ () |
| | Turns the antenna off by disabling pins TX1 and TX2. More...
|
| |
| virtual uint8_t | pcd_read_register (PcdRegister reg)=0 |
| |
| virtual void | pcd_read_register (PcdRegister reg, uint8_t count, uint8_t *values, uint8_t rx_align)=0 |
| | Reads a number of uint8_ts from the specified register in the MFRC522 chip. More...
|
| |
| virtual void | pcd_write_register (PcdRegister reg, uint8_t value)=0 |
| |
| virtual void | pcd_write_register (PcdRegister reg, uint8_t count, uint8_t *values)=0 |
| | Writes a number of uint8_ts to the specified register in the MFRC522 chip. More...
|
| |
| void | pcd_set_register_bit_mask_ (PcdRegister reg, uint8_t mask) |
| | Sets the bits given in mask in register reg. More...
|
| |
| void | pcd_clear_register_bit_mask_ (PcdRegister reg, uint8_t mask) |
| | Clears the bits given in mask from register reg. More...
|
| |
| void | pcd_transceive_data_ (uint8_t send_len) |
| | Transfers data to the MFRC522 FIFO, executes a command, waits for completion and transfers data back from the FIFO. More...
|
| |
| void | pcd_calculate_crc_ (uint8_t *data, uint8_t length) |
| | Use the CRC coprocessor in the MFRC522 to calculate a CRC_A. More...
|
| |
| StatusCode | await_transceive_ () |
| |
| StatusCode | await_crc_ () |
| |
| virtual void | call_loop () |
| |
| virtual void | call_dump_config () |
| |
| void | set_interval (const std::string &name, uint32_t interval, std::function< void()> &&f) |
| | Set an interval function with a unique name. More...
|
| |
| void | set_interval (uint32_t interval, std::function< void()> &&f) |
| |
| bool | cancel_interval (const std::string &name) |
| | Cancel an interval function. More...
|
| |
| void | set_retry (const std::string &name, uint32_t initial_wait_time, uint8_t max_attempts, std::function< RetryResult(uint8_t)> &&f, float backoff_increase_factor=1.0f) |
| | Set an retry function with a unique name. More...
|
| |
| void | set_retry (uint32_t initial_wait_time, uint8_t max_attempts, std::function< RetryResult(uint8_t)> &&f, float backoff_increase_factor=1.0f) |
| |
| bool | cancel_retry (const std::string &name) |
| | Cancel a retry function. More...
|
| |
| void | set_timeout (const std::string &name, uint32_t timeout, std::function< void()> &&f) |
| | Set a timeout function with a unique name. More...
|
| |
| void | set_timeout (uint32_t timeout, std::function< void()> &&f) |
| |
| bool | cancel_timeout (const std::string &name) |
| | Cancel a timeout function. More...
|
| |
| void | defer (const std::string &name, std::function< void()> &&f) |
| | Defer a callback to the next loop() call. More...
|
| |
| void | defer (std::function< void()> &&f) |
| | Defer a callback to the next loop() call. More...
|
| |
| bool | cancel_defer (const std::string &name) |
| | Cancel a defer callback using the specified name, name must not be empty. More...
|
| |
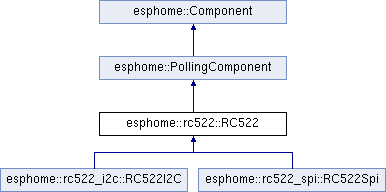
Definition at line 15 of file rc522.h.
 Public Member Functions inherited from esphome::PollingComponent
Public Member Functions inherited from esphome::PollingComponent