|
| void | setup () override |
| |
| void | dump_config () override |
| |
| float | get_setup_priority () const override |
| |
| void | update () override |
| |
| void | set_datarate (MMC5603Datarate datarate) |
| |
| void | set_x_sensor (sensor::Sensor *x_sensor) |
| |
| void | set_y_sensor (sensor::Sensor *y_sensor) |
| |
| void | set_z_sensor (sensor::Sensor *z_sensor) |
| |
| void | set_heading_sensor (sensor::Sensor *heading_sensor) |
| |
| | PollingComponent () |
| |
| | PollingComponent (uint32_t update_interval) |
| | Initialize this polling component with the given update interval in ms. More...
|
| |
| virtual void | set_update_interval (uint32_t update_interval) |
| | Manually set the update interval in ms for this polling object. More...
|
| |
| void | call_setup () override |
| |
| virtual uint32_t | get_update_interval () const |
| | Get the update interval in ms of this sensor. More...
|
| |
| void | start_poller () |
| |
| void | stop_poller () |
| |
| virtual void | loop () |
| | This method will be called repeatedly. More...
|
| |
| float | get_actual_setup_priority () const |
| |
| void | set_setup_priority (float priority) |
| |
| virtual float | get_loop_priority () const |
| | priority of loop(). More...
|
| |
| void | call () |
| |
| virtual void | on_shutdown () |
| |
| virtual void | on_safe_shutdown () |
| |
| uint32_t | get_component_state () const |
| |
| virtual void | mark_failed () |
| | Mark this component as failed. More...
|
| |
| bool | is_failed () const |
| |
| bool | is_ready () const |
| |
| virtual bool | can_proceed () |
| |
| bool | status_has_warning () const |
| |
| bool | status_has_error () const |
| |
| void | status_set_warning (const char *message="unspecified") |
| |
| void | status_set_error (const char *message="unspecified") |
| |
| void | status_clear_warning () |
| |
| void | status_clear_error () |
| |
| void | status_momentary_warning (const std::string &name, uint32_t length=5000) |
| |
| void | status_momentary_error (const std::string &name, uint32_t length=5000) |
| |
| bool | has_overridden_loop () const |
| |
| void | set_component_source (const char *source) |
| | Set where this component was loaded from for some debug messages. More...
|
| |
| const char * | get_component_source () const |
| | Get the integration where this component was declared as a string. More...
|
| |
| | I2CDevice ()=default |
| | we use the C++ default constructor More...
|
| |
| void | set_i2c_address (uint8_t address) |
| | We store the address of the device on the bus. More...
|
| |
| void | set_i2c_bus (I2CBus *bus) |
| | we store the pointer to the I2CBus to use More...
|
| |
| I2CRegister | reg (uint8_t a_register) |
| | calls the I2CRegister constructor More...
|
| |
| I2CRegister16 | reg16 (uint16_t a_register) |
| | calls the I2CRegister16 constructor More...
|
| |
| ErrorCode | read (uint8_t *data, size_t len) |
| | reads an array of bytes from the device using an I2CBus More...
|
| |
| ErrorCode | read_register (uint8_t a_register, uint8_t *data, size_t len, bool stop=true) |
| | reads an array of bytes from a specific register in the I²C device More...
|
| |
| ErrorCode | read_register16 (uint16_t a_register, uint8_t *data, size_t len, bool stop=true) |
| | reads an array of bytes from a specific register in the I²C device More...
|
| |
| ErrorCode | write (const uint8_t *data, size_t len, bool stop=true) |
| | writes an array of bytes to a device using an I2CBus More...
|
| |
| ErrorCode | write_register (uint8_t a_register, const uint8_t *data, size_t len, bool stop=true) |
| | writes an array of bytes to a specific register in the I²C device More...
|
| |
| ErrorCode | write_register16 (uint16_t a_register, const uint8_t *data, size_t len, bool stop=true) |
| | write an array of bytes to a specific register in the I²C device More...
|
| |
| bool | read_bytes (uint8_t a_register, uint8_t *data, uint8_t len) |
| | Compat APIs All methods below have been added for compatibility reasons. More...
|
| |
| bool | read_bytes_raw (uint8_t *data, uint8_t len) |
| |
| template<size_t N> |
| optional< std::array< uint8_t, N > > | read_bytes (uint8_t a_register) |
| |
| template<size_t N> |
| optional< std::array< uint8_t, N > > | read_bytes_raw () |
| |
| bool | read_bytes_16 (uint8_t a_register, uint16_t *data, uint8_t len) |
| |
| bool | read_byte (uint8_t a_register, uint8_t *data, bool stop=true) |
| |
| optional< uint8_t > | read_byte (uint8_t a_register) |
| |
| bool | read_byte_16 (uint8_t a_register, uint16_t *data) |
| |
| bool | write_bytes (uint8_t a_register, const uint8_t *data, uint8_t len, bool stop=true) |
| |
| bool | write_bytes (uint8_t a_register, const std::vector< uint8_t > &data) |
| |
| template<size_t N> |
| bool | write_bytes (uint8_t a_register, const std::array< uint8_t, N > &data) |
| |
| bool | write_bytes_16 (uint8_t a_register, const uint16_t *data, uint8_t len) |
| |
| bool | write_byte (uint8_t a_register, uint8_t data, bool stop=true) |
| |
| bool | write_byte_16 (uint8_t a_register, uint16_t data) |
| |
|
| virtual void | call_loop () |
| |
| virtual void | call_dump_config () |
| |
| void | set_interval (const std::string &name, uint32_t interval, std::function< void()> &&f) |
| | Set an interval function with a unique name. More...
|
| |
| void | set_interval (uint32_t interval, std::function< void()> &&f) |
| |
| bool | cancel_interval (const std::string &name) |
| | Cancel an interval function. More...
|
| |
| void | set_retry (const std::string &name, uint32_t initial_wait_time, uint8_t max_attempts, std::function< RetryResult(uint8_t)> &&f, float backoff_increase_factor=1.0f) |
| | Set an retry function with a unique name. More...
|
| |
| void | set_retry (uint32_t initial_wait_time, uint8_t max_attempts, std::function< RetryResult(uint8_t)> &&f, float backoff_increase_factor=1.0f) |
| |
| bool | cancel_retry (const std::string &name) |
| | Cancel a retry function. More...
|
| |
| void | set_timeout (const std::string &name, uint32_t timeout, std::function< void()> &&f) |
| | Set a timeout function with a unique name. More...
|
| |
| void | set_timeout (uint32_t timeout, std::function< void()> &&f) |
| |
| bool | cancel_timeout (const std::string &name) |
| | Cancel a timeout function. More...
|
| |
| void | defer (const std::string &name, std::function< void()> &&f) |
| | Defer a callback to the next loop() call. More...
|
| |
| void | defer (std::function< void()> &&f) |
| | Defer a callback to the next loop() call. More...
|
| |
| bool | cancel_defer (const std::string &name) |
| | Cancel a defer callback using the specified name, name must not be empty. More...
|
| |
Definition at line 16 of file mmc5603.h.
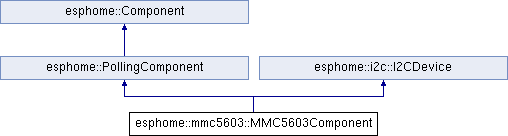
 Public Member Functions inherited from esphome::PollingComponent
Public Member Functions inherited from esphome::PollingComponent