NAU7802 24-bit ADC
The nau7802 sensor platform allows you to use your NAU7802 ADC
(datasheet, Adafruit) with ESPHome. This ADC is typically used with strain gauges to act as a weight sensor.
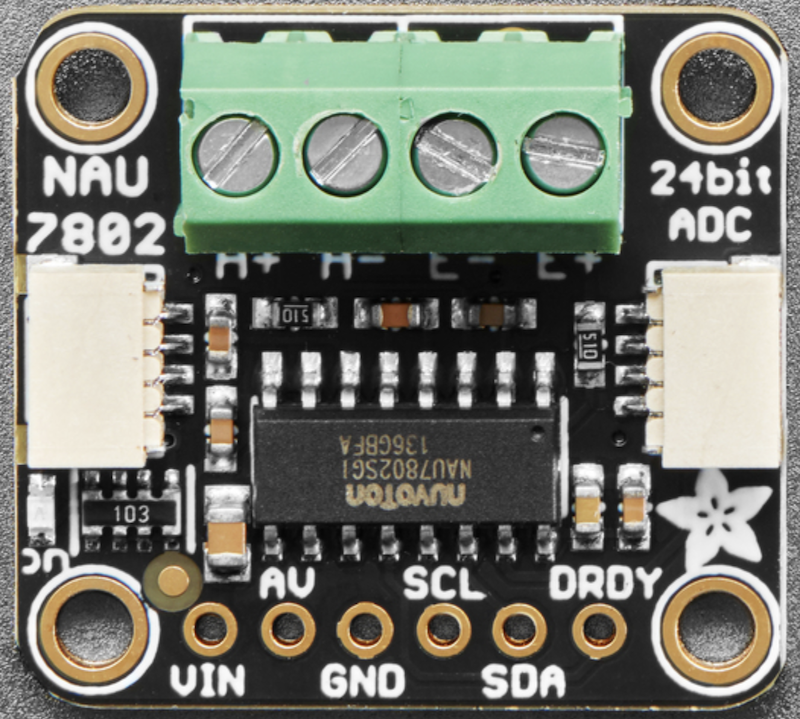
Connect power pins (VCC /GND ) and I2C (SDA /SCL ). If using external reference voltage connect (AV /AVDD ). Interrupt (INT /DRDY ) is not supported.
# Example configuration entry
sensor:
- platform: nau7802
name: "NAU7802 Value"
gain: 128
ldo_voltage: "3.0V"
update_interval: 60sConfiguration variables

gain (Optional, enum): ADC gain.
1248163264128(default)
ldo_voltage (Optional, enum): Voltage used for reference, should be less than
VCC2.4V2.7V3.0V(default)3.3V3.6V3.9V4.2V4.5VExternal,ExtUse this if are using theAV/AVDDPin
samples_per_second (Optional, enum): Sets the internal chip sample rate
10(default)204080320
offset_calibration (Optional, int): Pre calibrated offset value, range -8388608 to 8388607
gain_calibration (Optional, float): Pre calibrated gain value, range 0 to 511.9999998807907
update_interval (Optional, Time): The interval to check the sensor. Defaults to
60s.All other options from Sensor.
Calibration
The NAU7802 includes 3 types of calibration, Internal offset, External Offset, and External Gain. Using the Internal calibration should result in a consistent offset as it uses only reference voltage to calibrate. External calibration uses the sensor reading in its current state. That means if the load is not consistent when the action is executed then you will end up with varying results between calibrations and potential loss of range on the ADC.
For high precision applications it is recommended to perform your calibration and store then store the
results in your config using offset_calibration and gain_calibration fields for final usage.
You can retrieve the calibrated values when the component dumps its config or when you execute the
action to calibrate.
Converting Units
The NAU7802 does not translate its ADC values to weights directly and can be used with varying types of gauges, therefore you have to convert the measurement to units yourself. To calibrate the sensor:
.. The rest of this section is copied from the HX711 doc as the procedure is essentially the same
- Place a zero load or a known mass on the sensor, for example
0kg - Wait for the data to arrive in the logs and write down the value. For example
120. - Place another (different) known mass on the sensor, for example
1kg - Again wait for the data to arrive and note the value, for example
810.
Once you’ve done those steps, you can use the calibrate_linear filter to map the incoming value
to the calibrated one:
# Example configuration entry
sensor:
- platform: nau7802
# ... Other NAU7802 options
filters:
- calibrate_linear:
- 120 -> 0
- 810 -> 1
unit_of_measurement: kgReplace the masses and values 120.0, 810.0, etc with your values.