Sensor Component
ESPHome has support for many different sensors. Each of them is a
platform of the sensor domain and each sensor has several base
configuration options.
Base Sensor Configuration
Section titled “Base Sensor Configuration”All sensors in ESPHome have a name and some other optional configuration options. By default, the sensor platform will chose appropriate values for all of these by default, but you can always override them if you want to.
# Example sensor configurationname: Livingroom Temperature
# Optional variables:unit_of_measurement: "°C"icon: "mdi:water-percent"device_class: "temperature"state_class: "measurement"accuracy_decimals: 1expire_after: 30sfilters: - sliding_window_moving_average: window_size: 15 send_every: 15Configuration variables:
- id (Optional, string): Manually specify the ID for code generation. At least one of id and name must be specified.
- name (Optional, string): The name for the sensor. At least one of id and name must be specified.
NOTE
If you have a friendly_name set for your device and
you want the sensor to use that name, you can set name: None.
-
unit_of_measurement (Optional, string): Manually set the unit of measurement the sensor should advertise its values with. This does not actually do any maths (conversion between units).
-
device_class (Optional, string): The device class for the sensor. See https://www.home-assistant.io/integrations/sensor/#device-class for a list of available options. Set to
""to remove the default device class of a sensor. -
state_class (Optional, string): The state class for the sensor. See https://developers.home-assistant.io/docs/core/entity/sensor/#available-state-classes for a list of available options. Set to
""to remove the default state class of a sensor. -
icon (Optional, icon): Manually set the icon to use for the sensor in the frontend.
-
accuracy_decimals (Optional, int): Set the number of digits after the decimal point that data consumers should use. While this does not change the value sent across the API, Home Assistant’s ESPHome integration will round the value accordingly before using or storing it. The number of digits will also be used to set the entity’s default display precision. Thus, one can display fewer decimals, but cannot increase precision of sensor values in Home Assistant. (The default value varies depending on component and sensor.)
-
filters (Optional): Specify filters to use for some basic transforming of values. See Sensor Filters for more information.
-
internal (Optional, boolean): Mark this component as internal. Internal components will not be exposed to the frontend (like Home Assistant). Only specifying an
idwithout anamewill implicitly set this to true. -
force_update (Optional, boolean): If true, this option will force the frontend (usually Home Assistant) to create a state changed event when the sensor updates even if the value stayed the same. Some applications like Grafana require this when working with Home Assistant, but beware it can significantly increase the database size. Defaults to
false. -
disabled_by_default (Optional, boolean): If true, then this entity should not be added to any client’s frontend, (usually Home Assistant) without the user manually enabling it (via the Home Assistant UI). Defaults to
false. -
entity_category (Optional, string): The category of the entity. See https://developers.home-assistant.io/docs/core/entity/#generic-properties for a list of available options. Set to
""to remove the default entity category. -
If Webserver enabled and version 3 is selected, All other options from Webserver Component.. See Webserver Version 3.
Automations:
-
on_value (Optional, Automation): An automation to perform when a new value is published. See
on_value. -
on_value_range (Optional, Automation): An automation to perform when a published value transition from outside to a range to inside. See
on_value_range. -
on_raw_value (Optional, Automation): An automation to perform when a raw value is received that hasn’t passed through any filters. See
on_raw_value.
MQTT Options:
-
expire_after (Optional, Time): Manually set the time in which the sensor values should be marked as “expired”/“unknown”. Not providing any value means no expiry.
-
All other options from MQTT Component.
NOTE
If you’re trying to setup filters for a sensor that has multiple outputs - for example a DHT22 which
reports temperature and humidity - put the filters option into each sensor output like this:
sensor: - platform: dht # ... temperature: filters: # ... humidity: filters: # ...Sensor Filters
Section titled “Sensor Filters”ESPHome lets you pre-process sensor values before sending them to Home Assistant. This is useful, for example, if you want to apply an average to the last few readings.
Many filters are available for sensors, which you can define by adding a filters block in the sensor configuration (at the same level as platform or within each sensor block for platforms with multiple sensors).
Filters are applied in the order they are defined in your configuration.
# Example filters:filters: - offset: 2.0 - multiply: !lambda return 1.2; - calibrate_linear: - 0.0 -> 0.0 - 40.0 -> 45.0 - 100.0 -> 102.5 - filter_out: - 42.0 - 43.0 - median: window_size: 5 send_every: 5 send_first_at: 1 - quantile: window_size: 5 send_every: 5 send_first_at: 1 quantile: .9 - sliding_window_moving_average: window_size: 15 send_every: 15 - exponential_moving_average: alpha: 0.1 send_every: 15 - throttle: 1s - throttle_average: 1s - throttle_with_priority: timeout: 1s value: - 42.0 - 43.0 - heartbeat: 5s - debounce: 0.1s - timeout: 1min - delta: min_value: 5.0 max_value: 2% - or: - throttle: 1s - delta: 5.0 - lambda: return x * (9.0/5.0) + 32.0;Calibrate Linear Filter
Section titled “Calibrate Linear Filter”Calibrate your sensor values by using values you measured with an accurate “truth” source.
Configuration variables:
-
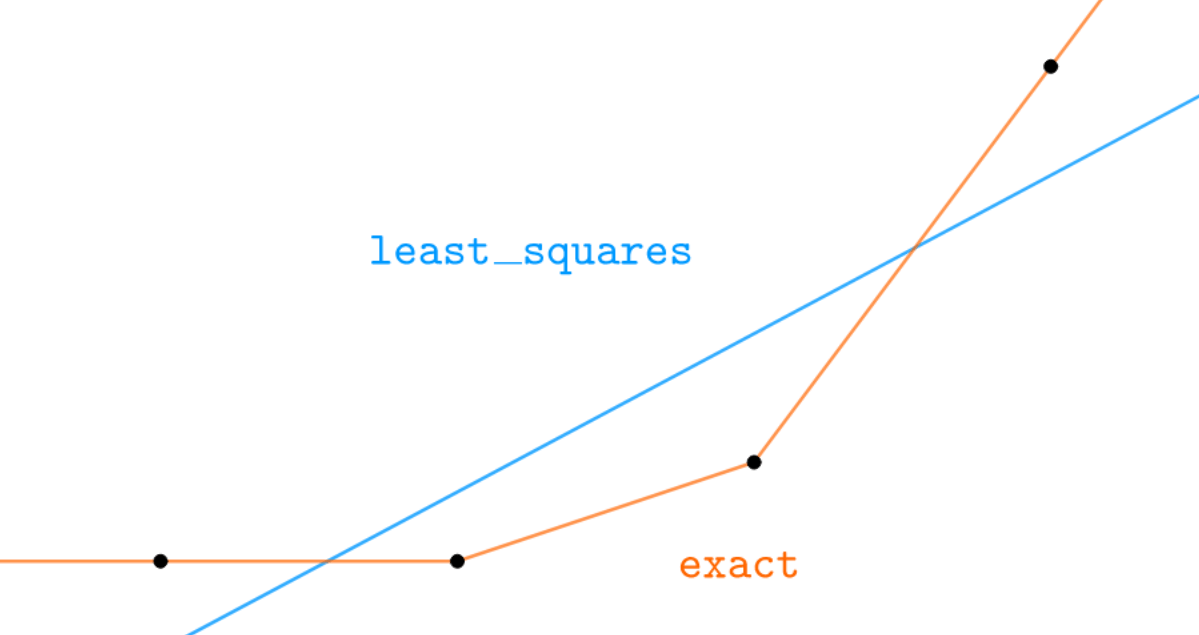
method (Optional, string): The method for calculating the linear function(s). One of
least_squaresorexact. Defaults toleast_squares. -
datapoints (Required): The list of datapoints.
First, collect a bunch of values of what the sensor shows and what the real value should be. For temperature, this can for example be achieved by using an accurate thermometer. For other sensors like power sensor this can be done by connecting a known load and then writing down the value the sensor shows.
# Example configuration entry- platform: dht # ... temperature: name: "DHT22 Temperature" filters: - calibrate_linear: method: least_squares datapoints: # Map 0.0 (from sensor) to 1.0 (true value) - 0.0 -> 1.0 - 10.0 -> 12.1The arguments are a list of data points, each in the form MEASURED -> TRUTH. Depending on
the method ESPHome will then either fit a linear equation to the values (using least squares)
or connect the values exactly using multiple linear equations. You need to supply at least two
values. When using least_squares and more than two values are given a linear solution will be
calculated and may not represent each value exactly.
Calibrate Polynomial Filter
Section titled “Calibrate Polynomial Filter”Calibrate your sensor values by fitting them to polynomial functions. This is similar to
the calibrate_linear filter, but also allows for higher-order functions like quadratic polynomials.
# Example configuration entry- platform: adc # ... filters: - calibrate_polynomial: degree: 2 datapoints: # Map 0.0 (from sensor) to 0.0 (true value) - 0.0 -> 0.0 - 10.0 -> 12.1 - 13.0 -> 14.0The arguments are a list of data points, each in the form MEASURED -> TRUTH. Additionally, you need
to specify the degree of the resulting polynomial, the datapoints will then be fitted to the given
degree with a least squares solver.
Clamp Filter
Section titled “Clamp Filter”Limits the value to the inclusive range between min_value and max_value.
Configuration variables:
- min_value (Optional, float): The lower bound of the range.
- max_value (Optional, float): The upper bound of the range.
- ignore_out_of_range (Optional, bool): If true, ignores all sensor values out of the range. Defaults to
false.
At least one of min_value or max_value must be specified.
When a sensor value is passed through this filter, if it is less than min_value, it will be set to min_value. If it
is greater than max_value, it will be set to max_value.
An unspecified bound is considered unbounded (i.e., if min_value is not set, there is no lower limit).
A value of NaN (not a number) will be clamped to the lower bound if min_value is set, otherwise to the upper bound.
A value of positive or negative infinity will be clamped to the upper or lower bound, respectively, if those bounds are
set.
If ignore_out_of_range is true, any values not within the specified range will be ignored instead of clamped.
# Example configuration entryfilters: - clamp: min_value: 10 max_value: 75 ignore_out_of_range: trueDebounce Filter
Section titled “Debounce Filter”Only send values if the last incoming value is at least specified time period
old. For example if two values come in at almost the same time, this filter will only output
the last value and only after the specified time period has passed without any new incoming
values.
Delta Filter
Section titled “Delta Filter”This filter stores the last value passed through this filter and only passes incoming values through
if incoming value is sufficiently different from the previously passed one.
This difference can be calculated in two ways an absolute difference or a percentage difference, and
with respect to a minimum, min_value and maximum value, max_value.
Configuration variables:
- min_value (Optional, float, percent): The minimum absolute or percentage difference required (default is
0.0) - max_value (Optional, float, percent): The maximum absolute or percentage difference allowed (default is infinity)
- baseline (Optional, float, lambda): A baseline to use when calculating the difference. By default the last passed value is used.
At least one of min_value or max_value must be specified. Alternatively to specifying min_value
and/or max_value as keys, you can also just provide a single float or percentage value. In this case the value
is interpreted as min_value.
The filter will reject values that do not differ from the baseline by more than min_value, or that
differ from the baseline by more than the max_value.
For example, if the filter were configured with a value of 2.0 only values that differ from the last
passed value by more than 2.0 will be passed through.
NOTE
A min_value of 0.0 means that
values equal to the last value will not be passed through, only values that differ, making it useful for
eliminating duplicate values.
# Example configuration entryfilters: - delta: min_value: 2.0 # Same as above, min_value is implied here. - delta: 2.0
- delta: max_value: 10% # Specifying both min_value and max_value is permitted. - delta: min_value: 2.0 max_value: 10%If a percentage is specified a percentage of the last value will be used as the required difference. For example if the filter were configured with a value of 20% and the last value passed through was 10, only values greater than or equal to 12 or less than or equal to 8 would be passed through. However, if the last value passed through was 100 only values greater than or equal to 120 or less than or equal to 80 would be passed through.
# Example configuration entryfilters: - delta: 20%When setting a maximum delta filter, it may be possible for the sensor values to escape the bandwidth permitted by the filter without returning. In this case, it can be helpful to override the value being compared from the default of the last value to an arbitrary other sensor that determines a baseline:
# Example configuration entrysensors: # This sensor just calculates the baseline. - platform: copy source_id: my_sensor_to_be_filtered id: baseline filters: - median: window_size: 6 send_every: 1 send_first_at: 1
# This sensor will publish the values from your sensor with the max delta filter applied. - platform: copy source_id: my_sensor_to_be_filtered name: "Filter Max With Baseline" id: filter_baseline_max filters: - delta: max_value: 10 baseline: !lambda return id(baseline).state;Exponential Moving Average Filter
Section titled “Exponential Moving Average Filter”A simple exponential moving average over the last few values. It can be used to have a short update interval on the sensor but only push out an average on a specific interval (thus increasing resolution).
Configuration variables:
-
alpha (Optional, float): The forget factor/alpha value of the filter. A higher value includes more details in the output while a lower value removes more noise. Defaults to
0.1. -
send_every (Optional, int): How often a sensor value should be pushed out. Defaults to
15. -
send_first_at (Optional, int): By default, the very first raw value on boot is immediately published. With this parameter you can specify when the very first value is to be sent. Defaults to
1.
Filter Out Filter
Section titled “Filter Out Filter”(Required, number): Filter out specific values to be displayed, e.g., filtering out the value 85.0
# Example configuration entryfilters: - filter_out: 85.0A list of values may be supplied, and values are templatable:
# Example configuration entryfilters: - filter_out: - 85.0 - !lambda return id(some_sensor).state;Heartbeat Filter
Section titled “Heartbeat Filter”Send the sensor value periodically at the specified time interval. If the sensor value changes during this interval, the timer will not reset — the last known value of the sensor will still be sent when the interval elapses.
For example, a value of 10s will cause the filter to output the last known value every 10 seconds,
regardless of how often the input value changes.
When using optimistic mode, the filter will still repeat the last known value at the configured interval,
but in addition, every new incoming value is published immediately as it arrives. This ensures that the
sensor output updates instantly on change, while maintaining a steady periodic “heartbeat” of the last value
between updates. This mode is useful for sensors where immediate responsiveness is desired.
Configuration variables:
- period (Required, time): The interval at which the last known value is republished.
- optimistic (Optional, boolean): When enabled, every new incoming value is published immediately as it arrives, regardless of the configured time interval.
# Example filtersfilters: - heartbeat: 5s - heartbeat: period: 5s optimistic: trueLambda Filter
Section titled “Lambda Filter”Perform a simple mathematical operation over the sensor values. The input value is x and
the result of the lambda is used as the output (use return ).
# Example configuration entryfilters: - lambda: return x * (9.0/5.0) + 32.0;Make sure to add .0 to all values in the lambda, otherwise divisions of integers will
result in integers (not floating point values).
To prevent values from being published, return {} :
# Example configuration entryfilters: - lambda: |- if (x < 10) return {}; return x-10;Max Filter
Section titled “Max Filter”A moving maximum over the last few values. A large window size will make the filter slow to react to input changes.
# Example configuration entry- platform: ... # ... filters: - max: window_size: 7 send_every: 4 send_first_at: 3Configuration variables:
-
window_size (Optional, int): The number of values over which to calculate the min/max when pushing out a value. Defaults to
5. -
send_every (Optional, int): How often a sensor value should be pushed out. For example, in above configuration the max is calculated after every 4th received sensor value, over the last 7 received values. Defaults to
5. -
send_first_at (Optional, int): By default, the very first raw value on boot is immediately published. With this parameter you can specify when the very first value is to be sent. Must be smaller than or equal to
send_everyDefaults to1.
Median Filter
Section titled “Median Filter”A simple moving median over the last few values. This can be used to filter outliers from the received sensor data. A large window size will make the filter slow to react to input changes.
# Example configuration entry- platform: wifi_signal # ... filters: - median: window_size: 7 send_every: 4 send_first_at: 3Configuration variables:
-
window_size (Optional, int): The number of values over which to calculate the median when pushing out a value. This number should be odd if you want an actual received value pushed out. Defaults to
5. -
send_every (Optional, int): How often a sensor value should be pushed out. For example, in above configuration the median is calculated after every 4th received sensor value, over the last 7 received values. Defaults to
5. -
send_first_at (Optional, int): By default, the very first raw value on boot is immediately published. With this parameter you can specify when the very first value is to be sent. Must be smaller than or equal to
send_everyDefaults to1.
Min Filter
Section titled “Min Filter”A moving minimum over the last few values. A large window size will make the filter slow to react to input changes.
# Example configuration entry- platform: wifi_signal # ... filters: - min: window_size: 7 send_every: 4 send_first_at: 3Configuration variables:
-
window_size (Optional, int): The number of values over which to calculate the min/max when pushing out a value. Defaults to
5. -
send_every (Optional, int): How often a sensor value should be pushed out. For example, in above configuration the min is calculated after every 4th received sensor value, over the last 7 received values. Defaults to
5. -
send_first_at (Optional, int): By default, the very first raw value on boot is immediately published. With this parameter you can specify when the very first value is to be sent. Must be smaller than or equal to
send_everyDefaults to1.
Multiply Filter
Section titled “Multiply Filter”Multiplies each value by a templatable value.
Offset Filter
Section titled “Offset Filter”Adds a value to each sensor value. The value may be a constant or a lambda returning a float.
# Example configuration entryfilters: - offset: 2.0 - offset: !lambda return id(some_sensor).state;Or Filter
Section titled “Or Filter”Pass forward a value with the first child filter that returns. Below example will only pass forward values that are either at least 1s old or are if the absolute difference is at least 5.0.
# Example configuration entryfilters: - or: - throttle: 1s - delta: 5.0Quantile Filter
Section titled “Quantile Filter”A simple moving quantile over the last few values. This can be used to filter outliers from the received sensor data. A large window size will make the filter slow to react to input changes.
# Example configuration entry- platform: wifi_signal # ... filters: - quantile: window_size: 7 send_every: 4 send_first_at: 3 quantile: .9Configuration variables:
-
window_size (Optional, int): The number of values over which to calculate the quantile when pushing out a value. Defaults to
5. -
send_every (Optional, int): How often a sensor value should be pushed out. For example, in above configuration the quantile is calculated after every 4th received sensor value, over the last 7 received values. Defaults to
5. -
send_first_at (Optional, int): By default, the very first raw value on boot is immediately published. With this parameter you can specify when the very first value is to be sent. Must be smaller than or equal to
send_everyDefaults to1. -
quantile (Optional, float): value from 0 to 1 to determine which quantile to pick. Defaults to
.9.
Round To Multiple Of Filter
Section titled “Round To Multiple Of Filter”Rounds the value to the nearest multiple. Takes a float greater than zero.
# Example configuration entryfilters: - round_to_multiple_of: 10 # 123 -> 120 # 126 -> 130
# Example configuration entryfilters: - round_to_multiple_of: 0.25 # 3.1415 -> 3.25 # 1.6180 -> 1.5Round Filter
Section titled “Round Filter”Rounds the value to the given decimal places.
# Example configuration entryfilters: - round: 1 # will round to 1 decimal placeSkip Initial Filter
Section titled “Skip Initial Filter”A simple skip filter; skip_initial: N skips the first N sensor readings and passes on the
rest. This can be used when the sensor needs a few readings to ‘warm up’. After the initial
readings have been skipped, this filter does nothing.
# Example configuration entryfilters: - skip_initial: 3Sliding Window Moving Average Filter
Section titled “Sliding Window Moving Average Filter”A simple moving average over the last few values. It can be used to have a short update interval on the sensor but only push out an average on a specific interval (thus increasing resolution).
# Example configuration entry- platform: wifi_signal # ... filters: - sliding_window_moving_average: window_size: 15 send_every: 15Configuration variables:
-
window_size (Optional, int): The number of values over which to perform an average when pushing out a value.
-
send_every (Optional, int): How often a sensor value should be pushed out. For example, in above configuration the weighted average is only pushed out on every 15th received sensor value.
-
send_first_at (Optional, int): By default, the very first raw value on boot is immediately published. With this parameter you can specify when the very first value is to be sent. Defaults to
1.
Throttle Average Filter
Section titled “Throttle Average Filter”An average over the specified time period, potentially throttling incoming values. When this filter gets incoming values, it sums up all values and pushes out the average after the specified time period passed. There are two edge cases to consider within the specified time period :
- no value(s) received:
NaNis returned - add theheartbeatfilter if periodical pushes are required and/orfilter_out: nanif required - one value received: the value is pushed out after the
specified time periodpassed, without calculating an average
For example a throttle_average: 60s will push out a value every 60 seconds, in case at least one sensor value is received within these 60 seconds.
In comparison to the throttle filter, it won’t discard any values. In comparison to the sliding_window_moving_average filter, it supports variable sensor reporting rates without influencing the filter reporting interval (except for the first edge case).
Throttle With Priority Filter
Section titled “Throttle With Priority Filter”Throttle the incoming values unless they match a prioritized value. When this filter gets an incoming value, it first
checks if it matches one of the prioritized values. If so, the value is passed through immediately. Otherwise, it
checks if the last incoming value is at least specified time period old. If it is not older than the configured
value, the value is not passed forward.
# Example configuration entryfilters: - throttle_with_priority: timeout: 1s value: - nan - 0Throttle Filter
Section titled “Throttle Filter”Throttle the incoming values. When this filter gets an incoming value,
it checks if the last incoming value is at least specified time period old.
If it is not older than the configured value, the value is not passed forward.
# Example configuration entryfilters: - throttle: 1sTimeout Filter
Section titled “Timeout Filter”After the first value has been sent, if no subsequent value is published within the specified timeout period, send
a templatable value which defaults to NaN. The value may also be set to last, which will result in the last
value received by the filter being sent again.
This filter particularly is useful when:
- data is derived from some communication channel (a serial port, for example) which can potentially be interrupted.
- placed ahead of a throttle filter to ensure that the last value published will pass through the throttle.
# Example configuration entryfilters: - timeout: 10s # sent value will be NaN - timeout: timeout: 10s value: !lambda return 0; - timeout: timeout: 10s value: last # sent value will be the last value received by the filterTo Ntc Resistance Filter
Section titled “To Ntc Resistance Filter”Convert your sensor values available as temperature into corresponding resistance values using an NTC characteristic curve.
Configuration variables:
- calibration (Required): calibration data.
A resistance/temperature characteristic curve is required to use this filter. This can be taken from a corresponding diagram in a data sheet. If you do not have access to the data sheet or want to calculate these values yourself, you must first measure three resistance values at different temperatures. Heat or cool the NTC to three different temperatures (preferably widely separated temperatures) and note the resistance values at these temperatures. Then enter these values in the calibration parameter:
# Example configuration entry- platform: template id: to_ntc_resistance_sensor1 unit_of_measurement: "Ohm" lambda: |- return id(some_sensor).state; update_interval: 1s filters: - to_ntc_resistance: calibration: - 10.0kOhm -> 25°C - 27.219kOhm -> 0°C - 14.674kOhm -> 15°CThe filter determines coefficients for the Steinhart-Hart equation from the specified pairs of values which can also be specified directly as an alternative.
# Example configuration entry- platform: template id: to_ntc_resistance_sensor2 unit_of_measurement: "Ohm" lambda: |- return id(some_sensor).state; update_interval: 1s filters: - to_ntc_resistance: calibration: a: 1.439114856904070E-03 b: 2.693066430764570E-04 c: 1.653440958554570E-07To send the resistance value generated by this sensor to an output component, e.g. a
digital potentiometer or a DAC, the sensor automation on_value can be used.
This makes it possible, for example, to replace a physical NTC and thus make it smart.
An output component can accept values in the range of 0..1 (see output.set_level Action),
so that scaling with the actual resistance value of the simulated NTC is required.
# Example configuration entryon_value: then: - output.set_level: id: output_id level: !lambda return x / 100000.0;To Ntc Temperature Filter
Section titled “To Ntc Temperature Filter”Convert your sensor values available as resistance values into corresponding temperatures using an NTC characteristic curve.
Configuration variables:
- calibration (Required): calibration data.
A resistance/temperature characteristic curve is required to use this filter. This can be taken from a corresponding diagram in a data sheet. If you do not have access to the data sheet or want to calculate these values yourself, you must first measure three resistance values at different temperatures. Heat or cool the NTC to three different temperatures (preferably widely separated temperatures) and note the resistance values at these temperatures. Then enter these values in the calibration parameter:
# Example configuration entry- platform: template id: to_ntc_temperature_sensor1 unit_of_measurement: "°C" lambda: |- return id(some_sensor).state; update_interval: 1s filters: - to_ntc_temperature: calibration: - 10.0kOhm -> 25°C - 27.219kOhm -> 0°C - 14.674kOhm -> 15°CThe filter determines coefficients for the Steinhart-Hart equation from the specified pairs of values which can also be specified directly as an alternative.
# Example configuration entry- platform: template id: to_ntc_temperature_sensor2 unit_of_measurement: "°C" lambda: |- return id(some_sensor).state; update_interval: 1s filters: - to_ntc_temperature: calibration: a: 1.439114856904070E-03 b: 2.693066430764570E-04 c: 1.653440958554570E-07Example: Converting Celsius to Fahrenheit
Section titled “Example: Converting Celsius to Fahrenheit”While I personally don’t like the Fahrenheit temperature scale, I do understand that having temperature values appear in the Fahrenheit unit is quite useful to some users. ESPHome uses the Celsius temperature unit internally, and I’m not planning on making converting between the two simple (😉), but you can use this filter to convert Celsius values to Fahrenheit.
filters: - lambda: return x * (9.0/5.0) + 32.0;unit_of_measurement: "°F"Sensor Automation
Section titled “Sensor Automation”You can access the most recent state of the sensor in lambdas using
id(sensor_id).state and the most recent raw state using id(sensor_id).raw_state.
on_value
Section titled “on_value”This automation will be triggered when a new value that has passed through all filters
is published. In Lambdas you can get the value from the trigger
with x.
sensor: - platform: dht # ... on_value: then: - light.turn_on: id: light_1 red: !lambda "return x/255;"Configuration variables: See Automation.
on_value_range
Section titled “on_value_range”With this automation you can observe if a sensor value passes from outside a defined range of values to inside a range. For example you can have an automation that triggers when a humidity crosses a threshold, and then turns on a dehumidifier. This trigger will only trigger when the new value is inside the range and the previous value was outside the range. On startup, the last state before reboot is restored and if the value crossed the boundary during the boot process, the trigger is also executed.
Define the range with above and below. If only one of them is defined, the interval is half-open.
So for example above: 5 with no below would mean the range from 5 to positive infinity.
sensor: - platform: dht # ... on_value_range: - below: 5.0 then: - switch.turn_on: relay_1 - above: 5.0 below: 10.0 then: - switch.turn_on: relay_2 - above: 10.0 then: - switch.turn_on: relay_3Configuration variables:
- above (Optional, float): The minimum for the trigger.
- below (Optional, float): The maximum for the trigger.
- See Automation.
on_raw_value
Section titled “on_raw_value”This automation will be triggered when a new value is received that hasn’t passed
through any filters. In Lambdas you can get the value from the
trigger with x.
sensor: - platform: dht # ... on_raw_value: then: - light.turn_on: id: light_1 red: !lambda "return x/255;"Configuration variables: See Automation.
sensor.in_range Condition
Section titled “sensor.in_range Condition”This condition passes if the state of the given sensor is inside a range.
Define the range with above and below. If only one of them is defined, the interval is half-open.
So for example above: 5 with no below would mean the range from 5 to positive infinity.
# in a trigger:on_...: if: condition: sensor.in_range: id: my_sensor above: 50.0 then: - script.execute: my_scriptConfiguration variables:
- above (Optional, float): The minimum for the condition.
- below (Optional, float): The maximum for the condition.
Lambda calls
Section titled “Lambda calls”From lambdas, you can call several methods on all sensors to do some advanced stuff (see the full API Reference for more info).
publish_state(): Manually cause the sensor to push out a value. It will then be processed by the sensor filters, and once filtered will propagate though ESPHome and though the API to Home Assistant or out via MQTT if configured.
// Within lambda, push a value of 42.0 id(my_sensor).publish_state(42.0);.state: Retrieve the current value of the sensor that has passed through all sensor filters. IsNANif no value has gotten through all filters yet.
// For example, create a custom log message when a value is received: ESP_LOGI("main", "Value of my sensor: %f", id(my_sensor).state);raw_state: Retrieve the current value of the sensor that has not passed through any filters. IsNANif no value has been pushed by the sensor itself yet.
// For example, create a custom log message when a value is received: ESP_LOGI("main", "Raw Value of my sensor: %f", id(my_sensor).raw_state);